- date
- 2020.12.10
- modification day
- 2020.12.10
- author
- 관리자
- hits
- 11
능동형 현가장치가 장착된 40km/h급 밸런싱 주행 로봇 개발
연구 과제명 : 능동형 현가장치가 장착된 40km/h급 밸런싱 주행 로봇 개발
목표 :
l 직렬 탄성 액추에이터가 장착된 능동형 현가장치를 이용한 고속기동용 밸런싱 주행로봇
l 직렬 탄성 액추에이터의 컴플라이언스 제어를 활용한 승차감, 주행안정성 향상
l 고속 전동기 제어기술 및 MTPA 기술을 활용한 효율적인 고속 주행 기법 확보
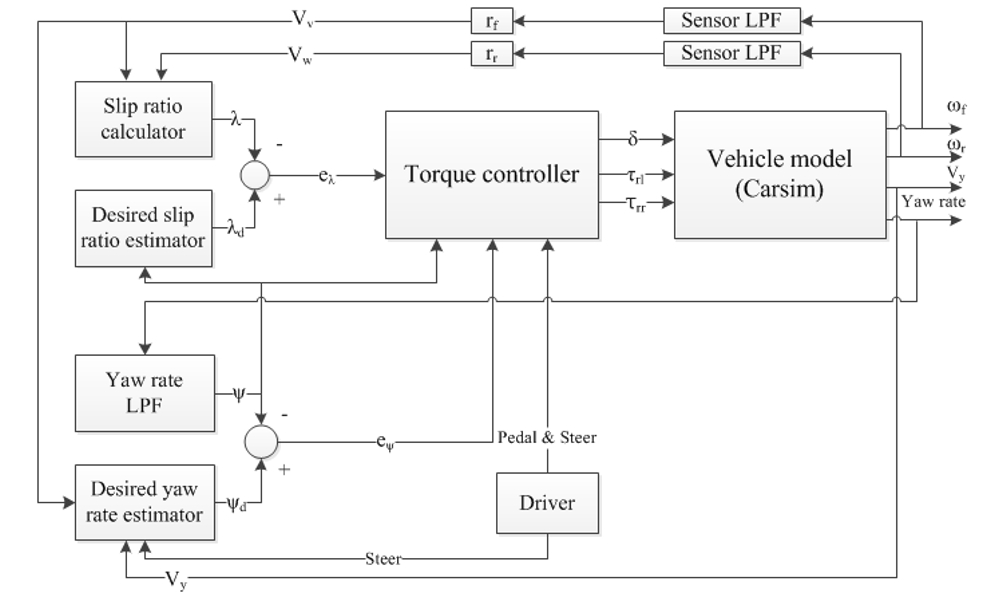
l 고속기동시, ABS/TCS/VDC와 같은 슬립제어 알고리즘으로 인한 주행 안정성 향상
l 자이로센서와 가속도센서의 실시간 신호처리 기법에 의한 강인 피치제어기 개발
1차년도 계획 :
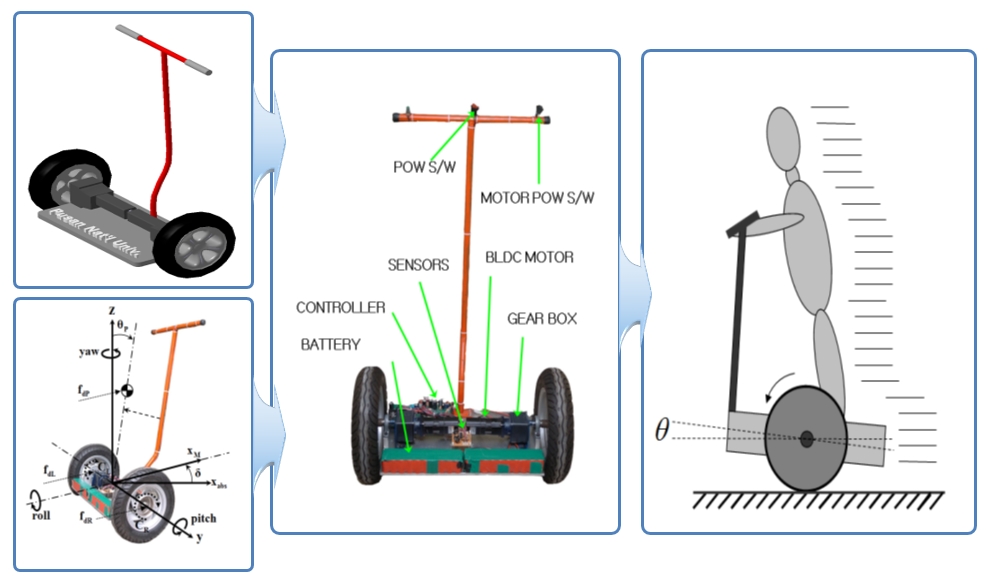
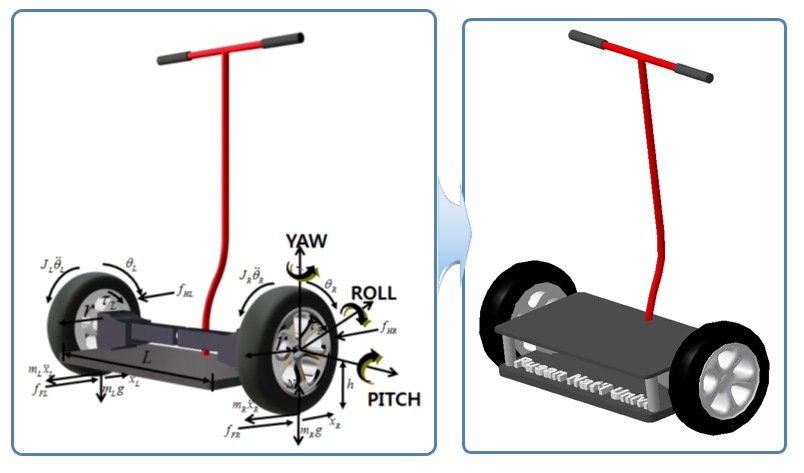
l 직립이동형 밸런싱 주행로봇 설계 및 제작
l 직립이동형 밸런싱 주행로봇의 동역학 모델링
l 직립이동형 밸런싱 주행로봇의 Pitch 축 제어 시뮬레이션
l 고속 전동기 구동을 위한 모터드라이버 제어기 설계 및 제작
2차년도 계획 :
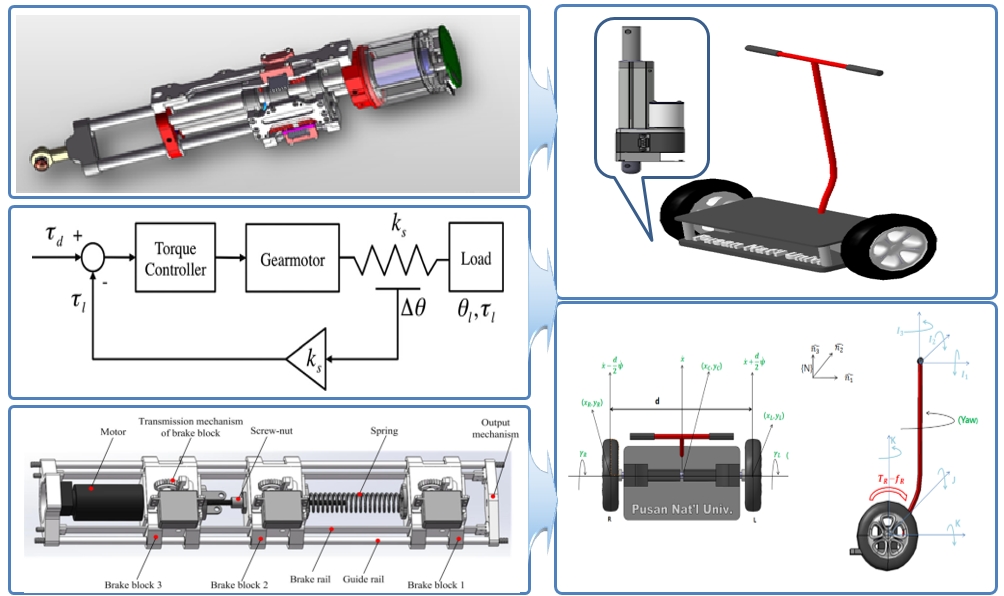
l 직렬 탄성 액추에이터 설계 및 Prototype 제작
l 액추에이터 시뮬레이션 및 성능 분석
l 능동형 현가장치가 장착된 밸런싱 주행로봇 설계 및 제작
3차년도 계획 :
l 노면의 마찰력 추정 알고리즘 개발
l 직렬 탄성 추에이터 제어기 개발
l 휠-토크 기반 제어기 설계 및 시뮬레이션
l 롤 제어 / Anti Slip 알고리즘 연구
l 자이로 센서 및 가속도 센서의 신호처리 기법 연구
4년도 계획 :
l IPMSM 전동기의 고속 제어를 위한 약자속 제어 기법 개발
l 모터의 정밀 위치 / 속도 제어 기법 연구
l 상용화를 위한 최적 설계
l 실차 주행 테스트
l 국내외 시험 / 인증
- file
- there is no file