- date
- 2020.03.10
- modification day
- 2020.03.10
- author
- 관리자
- hits
- 6
밀폐/복잡구조물 내부에서 작업 가능한 이동형/소형 용접로봇시스템 개발
연구 과제명 : 밀폐/복잡구조물 내부에서 작업 가능한 이동형/소형 용접로봇시스템 개발
목표 :
l 밀폐/복잡 구조물 내부 용접 로봇 및 자동화
l 용접 로봇 제어에 최적화된 원격 조종기 디자인
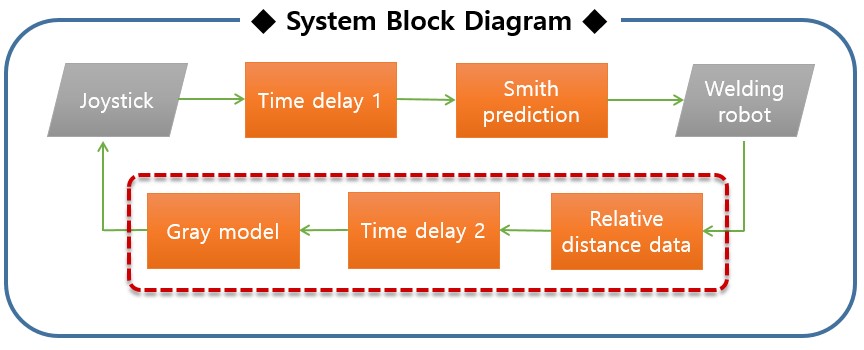
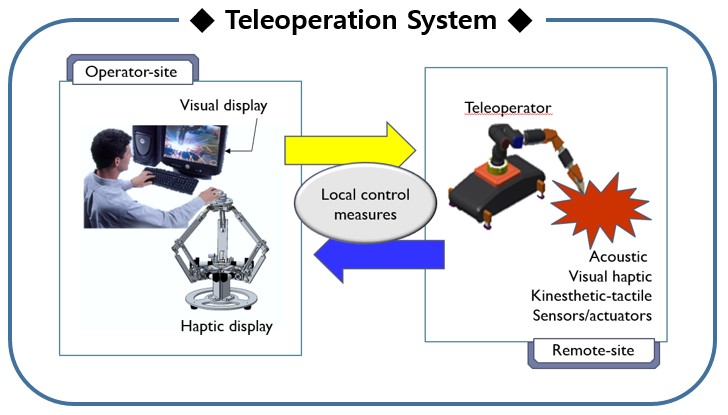
l Master-Slave device간의 원격제어 시스템 개발
l 작업환경정보 전달을 위한 Force Feedback의 적용
l 통신에서 Time delay 보상 알고리즘 개발
l 원격 조작 응답시간 최소화
- file
- there is no file