- date
- 2019.09.18
- modification day
- 2019.09.18
- author
- 관리자
- hits
- 675
야외 차량 및 선박용 Multi-copter의 자동 이/착륙 핵심 기술 연구
연구 목표
● 험지에서 주행하는 차량이나, 파도나 바람의 영향이 큰 선박과 같은 주행체의 자세가 동적으로 변화하는 상황에서,
Multi-copter가 강인하게 주행체로의 자동 이/착륙이 가능하도록 하는 알고리즘 및 그에 따른 운용 시스템을 연구한다.
이를 위하여, Visual servoing 기반의 Landing platform의 강인제어를 구현하여, Multi-copter가 안정적으로 주행체에
이/착륙을 하도록 하는 핵심 기술을 연구한다.
1차년도
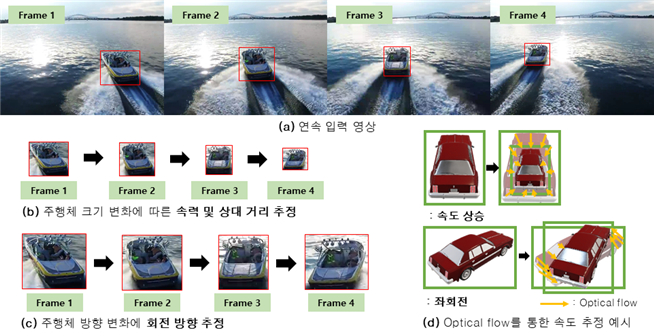
● 카메라를 이용한 임의 주행체의 속도 및 카메라와의 상대거리 추정 알고리즘 연구
- 카메라 Gimbal 시스템을 이용한 실시간 주행체 추종 알고리즘
- Multi-copter와 주행체 간의 상대 속도 및 거리 추정 알고리즘
● Multi-copter에 요구되는 Landing 자세를 동적으로 제어하는 Adaptive landing 알고리즘
- Adaptive landing platform 구현
2차년도
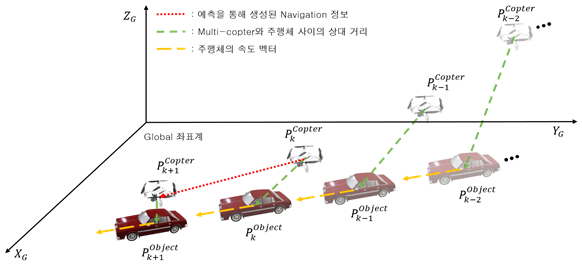
● Multi-copter와 주행체의 상대속도에 따른 Navigation 및 안정된 Landing 협조 연구
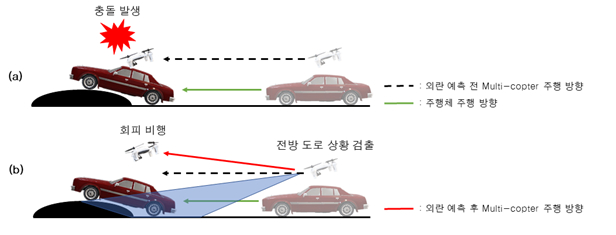
- 대속도에 따른 주행체의 이동 위치 예측과 이를 통한 Multi-copter의 경로 계획
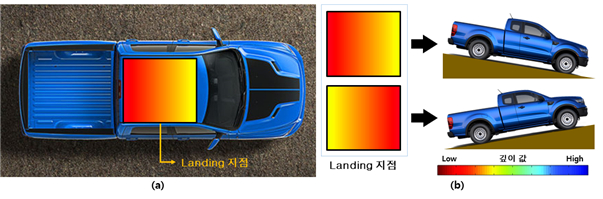
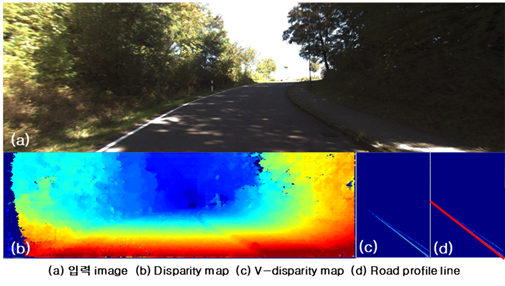
- Landing platform과 주행체의 협조 제어를 위한 깊이지도 생성
● Multi-copter와 Landing platform의 동적 협조제어를 통한 안정적 Landing 제어 연구
- Multi-copter의 안정적 Landing을 위한 Landing platform 수평 제어
- 부하 변화에 강인한 Multi-copter 제어
3차 년도
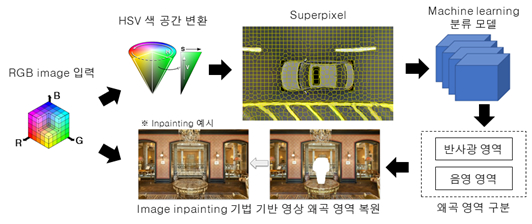
● Multi-copter의 Navigation 및 Landing 안정화를 위한 왜곡된 주행체 영상 복원 연구
- 반사광 및 음영에 의한 영상 왜곡 복원
● Landing시 발생하는 순간 Reaction force를 극복하기 위한 Landing platform의 강인 제어
- Soft landing을 위한 Landing leg의 능동 Compliance 제어기 설계
● 시스템 통합 및 강인성 향상 알고리즘 연구
- 필드 테스트를 통한 Multi-copter의 강인한 Landing 제어 구현
- 강인한 Landing 제어를 보다 안정적으로 구현하기 위하여 SMC(Sliding Mode Control) [26-28] 알고리즘 연구
- WMO(World Meteorological Organization) sea state level 2의 해상 상황(0.1~0.5m)에서의 파고 분석과 예측을 통한
Multi-copter의 주행 알고리즘 연구
- file
- there is no file