- date
- 2017.02.16
- modification day
- 2017.02.16
- author
- robotics 관리자
- hits
- 1824
인공지능을 이용한 로봇 매니퓰레이터의 조작 기술 개발
전체 기술 개발 목표 (창의성)
l듀얼 암 시스템을 활용한 인공지능 기반의 다양한 물체인식, 파지 및 조작 기술 개발
l제조용 로봇(양팔 로봇) 및 서비스용 로봇(농업, 의료 및 재활)의 성능 고도화를 위한
인공지능 기반 로봇 매니퓰레이터의 작업 대상물 인식 및 조작 제어 기술 개발

1차년도
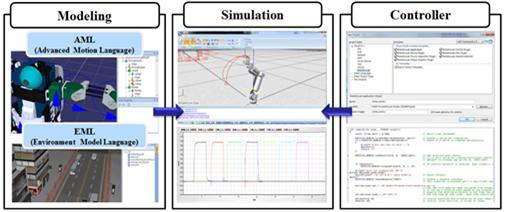
l 양팔로봇의 기구학 및 동역학 분석
l 기구학 및 동역학 분석을 통한 시뮬레이션
2차년도
l 티칭 인터페이스 개발을 위한 기존 티칭 인터페이스 연구
l 직접교시와 간접교시 2가지 방법을 이용하여 티칭 알고리즘 연구
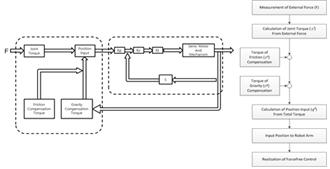
l 직접 교시
교시자가 로봇을 직접 움직여 수행할 동작을 가르치는 직접 교시 방법 연구 <
l 간접 교시
각종 센서가 부착된 Data Glove를 이용한 간접 교시 방법 연구
Data Glove를 직접 착용하여 사용자의 움직임의 정보를 기록 및 전달한 후 이 정보를 이용하여 사용자의 움직임을 로봇에게 교시하는 시스템 구축

3차년도
l 작업환경에 따른 실시간 경로생성 알고리즘 연구
-양팔 조작성 지수를 이용한 최적 궤적 생성
l 물체의 형태에 따른 파지 알고리즘 개발 및 파지 위치, 패턴 연구
-컴플라이언스 제어를 이용한 파지의 유연성 증가
-파지 패턴을 정의하여 물체 파지에 대한 파지력 제어
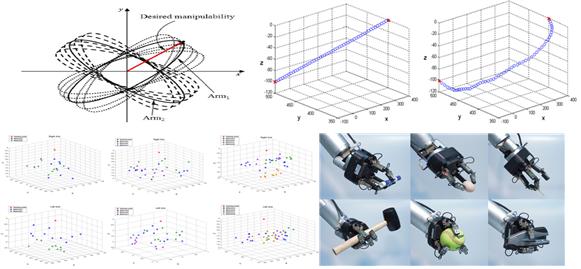
양팔 조작성 지수, 최적경로(위) 파지 패턴에 대한 다양한 정의(아래)
4차년도
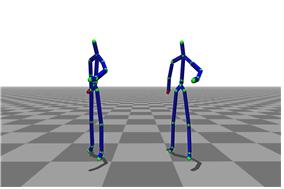
l 티칭인터페이스의 개발
-body sekleton을 추출하여 이를 기반으로 양팔 로봇의 움직임을 제어
-이를 통한 직접적인 교시로 사용
- file
- there is no file